Space Camera 1
1 Aug 2010
Project Hollands Hoogte: Scientific / Educational High Altitude near-space balloon project from The Netherlands. aka “Project HoHoHo I”
Buy a balloon, put helium in. Attach a camera, and let it go, then pick it up when it lands! Sounds easy? It is! We put a GPS device in the balloon, that broadcasted its location through radiosignals so we knew where it was during flight. So we picked it up from the ijsselmeer, where it landed. It taped video and took many pictures on its journey through 32km of atmosphere. It’s result is displayed below.
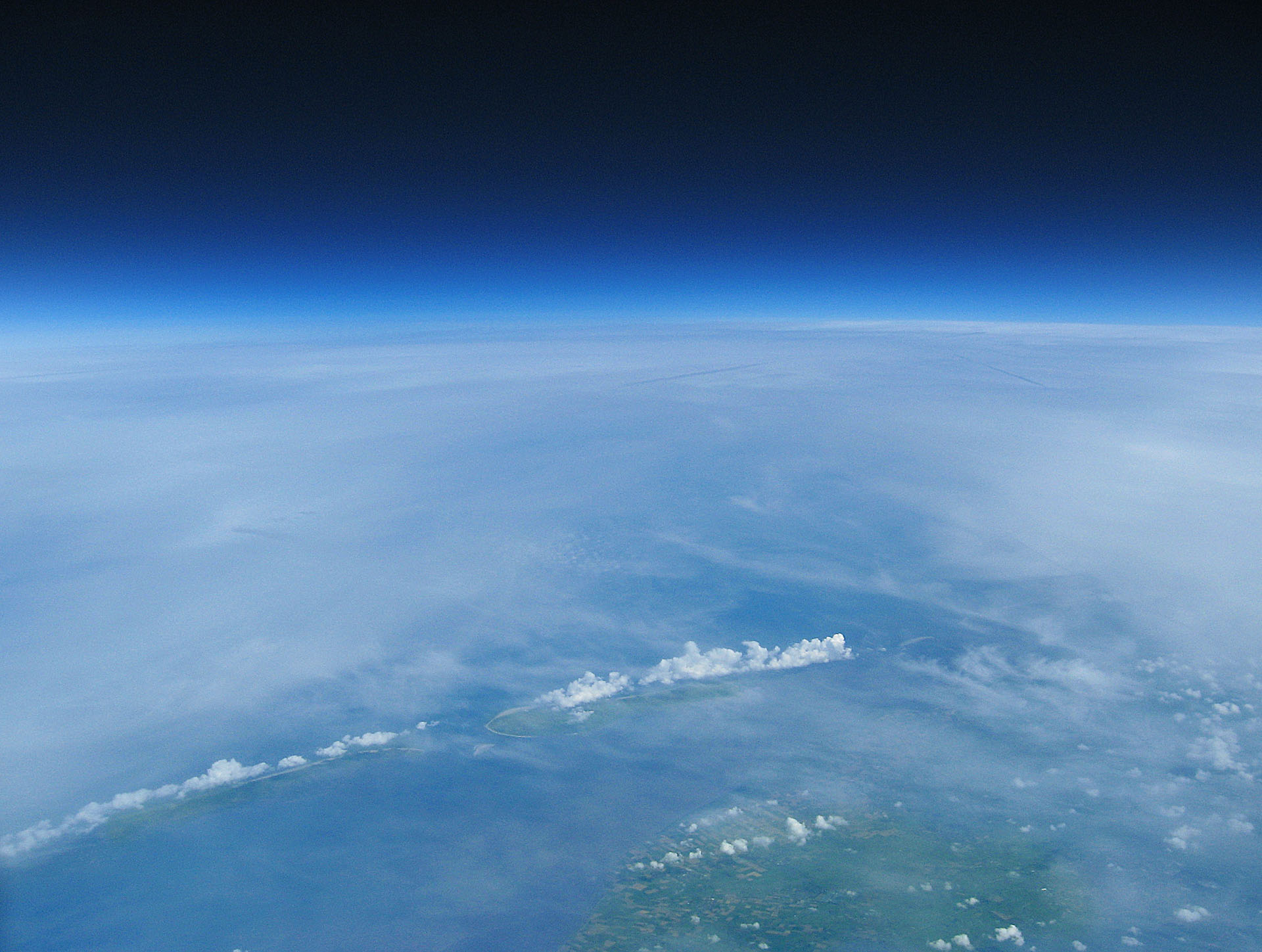
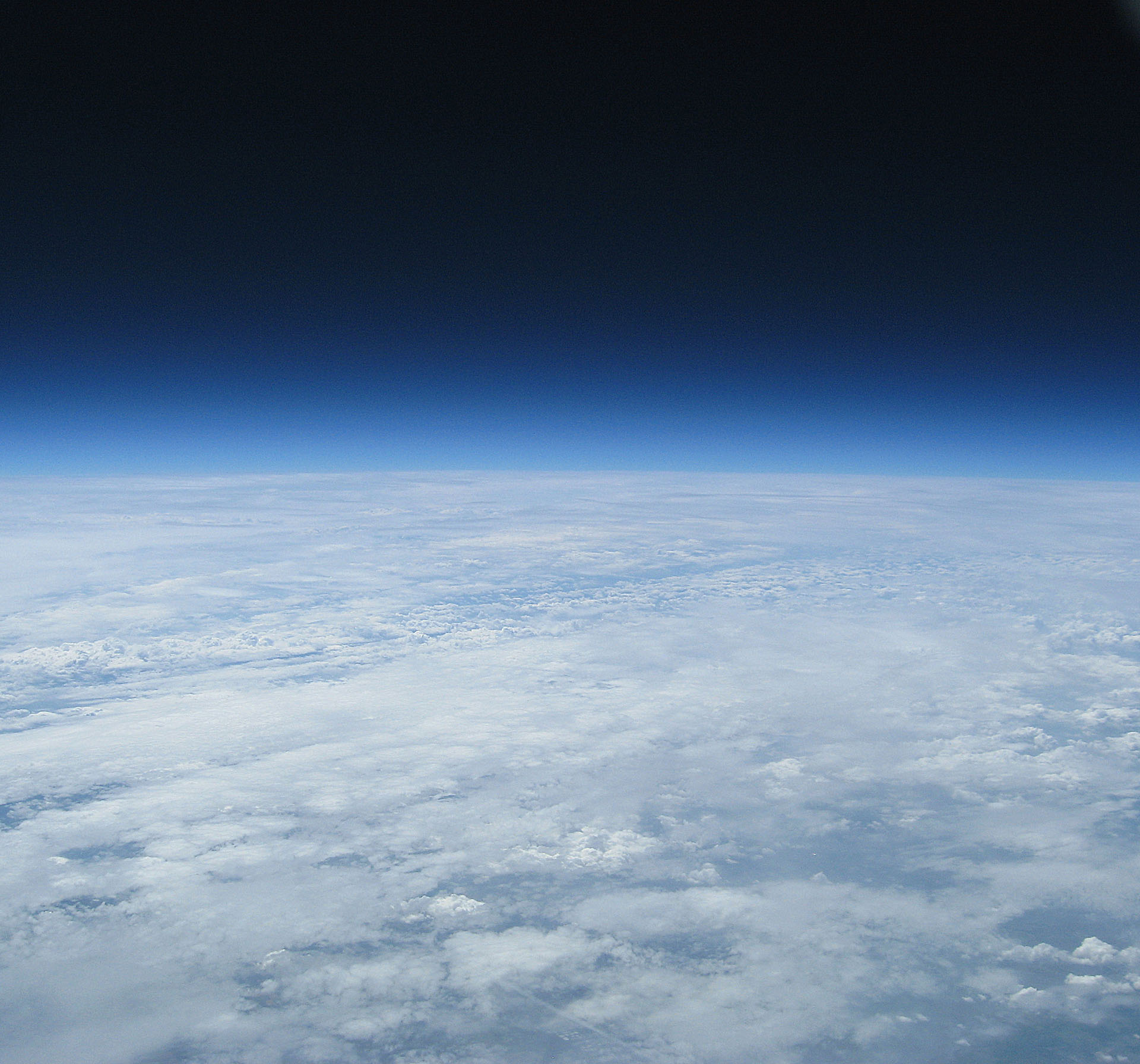
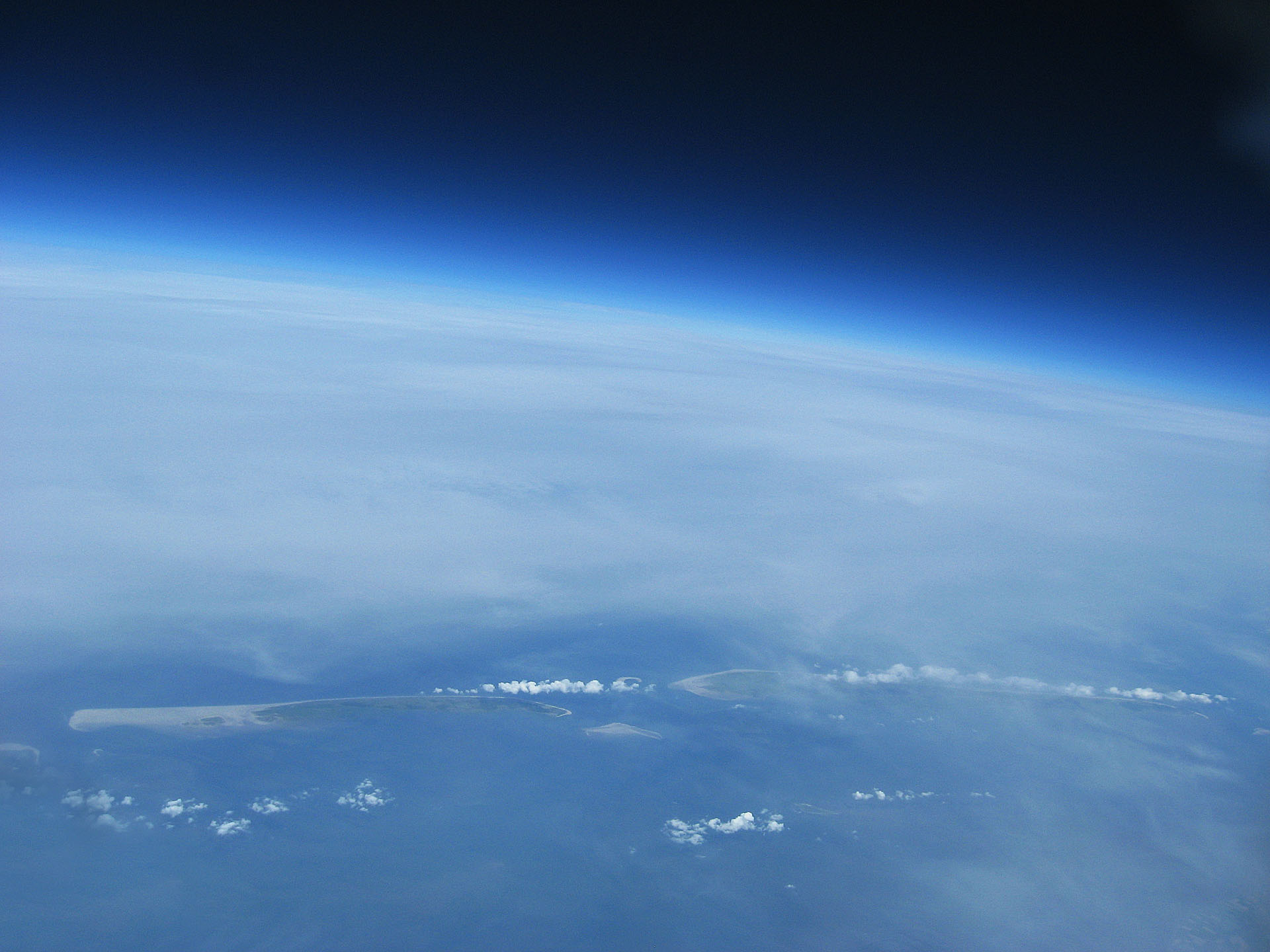
First a picture!
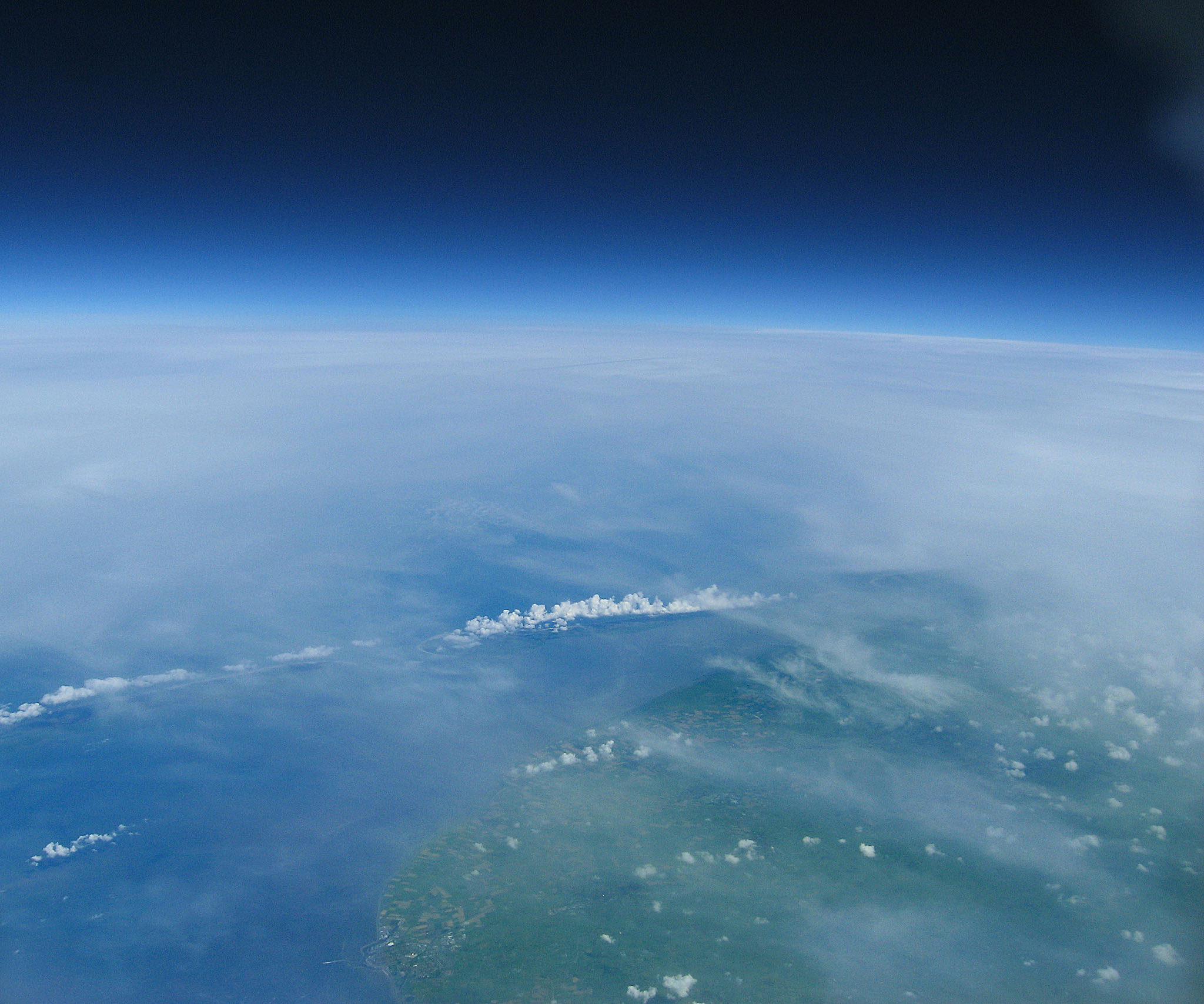
Oh hi: it’s the provice of Friesland from 31km altitude!
Tracked it with GPS, that we picked up in the car with a radio, and got an sms from the payload when it splashed down in the middle of the ijsselmeer. Asked someone for a boat, and chased the payload, and found it, still making pictures! Hence the pictures here.. If you have Google Earth you can download this file TODO(tzaman): add KML that includes the trajectory on the earth, including thumbnails of ALL the pictures taken over north holland! It’s only 3Mb big.
Flight Statistics
| Cost | €250 |
| Launch | 01-08-2010 (11:35 GMT+1), Heiloo, Northern Holland (Netherlands) |
| Recovery | 14:25 |
| Time-to-ground | ~1:52h |
| Float-time | 58 min |
| Max. Altitude | 31.300 meter |
| Weight | ~1000g |
| Contents | Sensors, Flightcomputer (x1), GPS (x2), Camera (x3) |
| Pictures | 700 Pictures |
| Video | 111 min + 61 min |
OK Time to watch the video that sums it all up. Don’t hesitate to drop a comment! You can leave a comment at the bottom of this page, or per picture individually! Scroll down for pictures and movies!
Video: Compilation

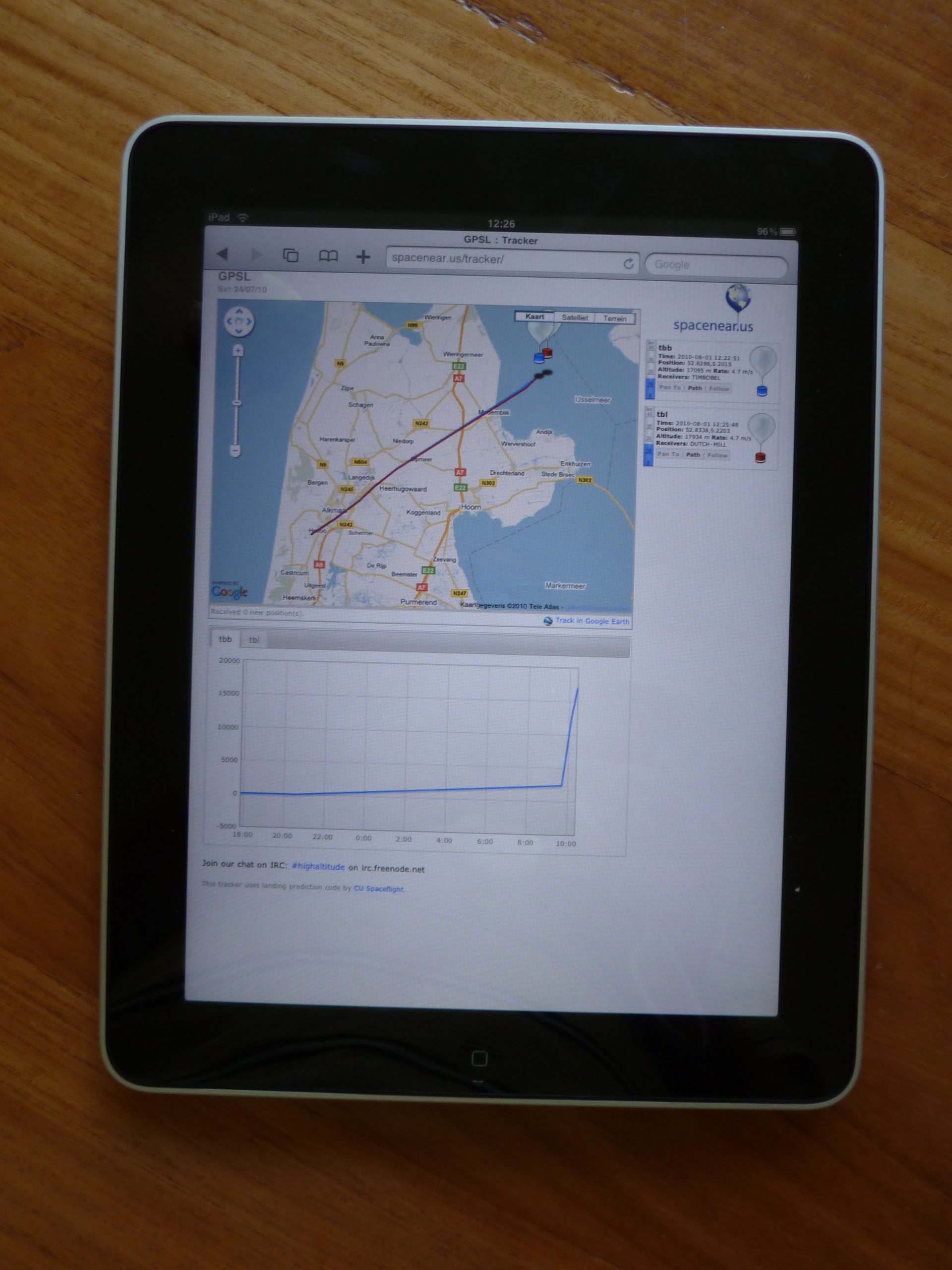
We tracked the balloon live from the car on google maps
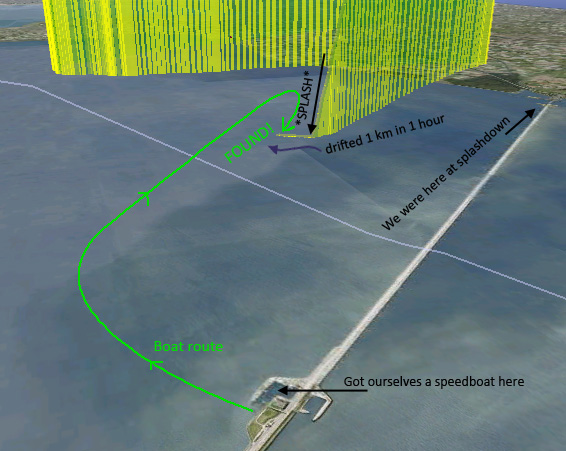
It splashed down in the Ijsselmeer. We just asked someone’s boat and picked it up! (see the end of the video)
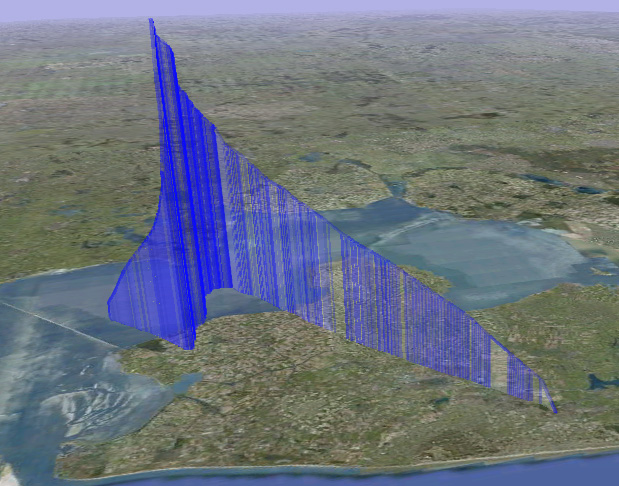
These were all the GPS positions that we received from launch to splashdown (you can download this data if you scroll down)
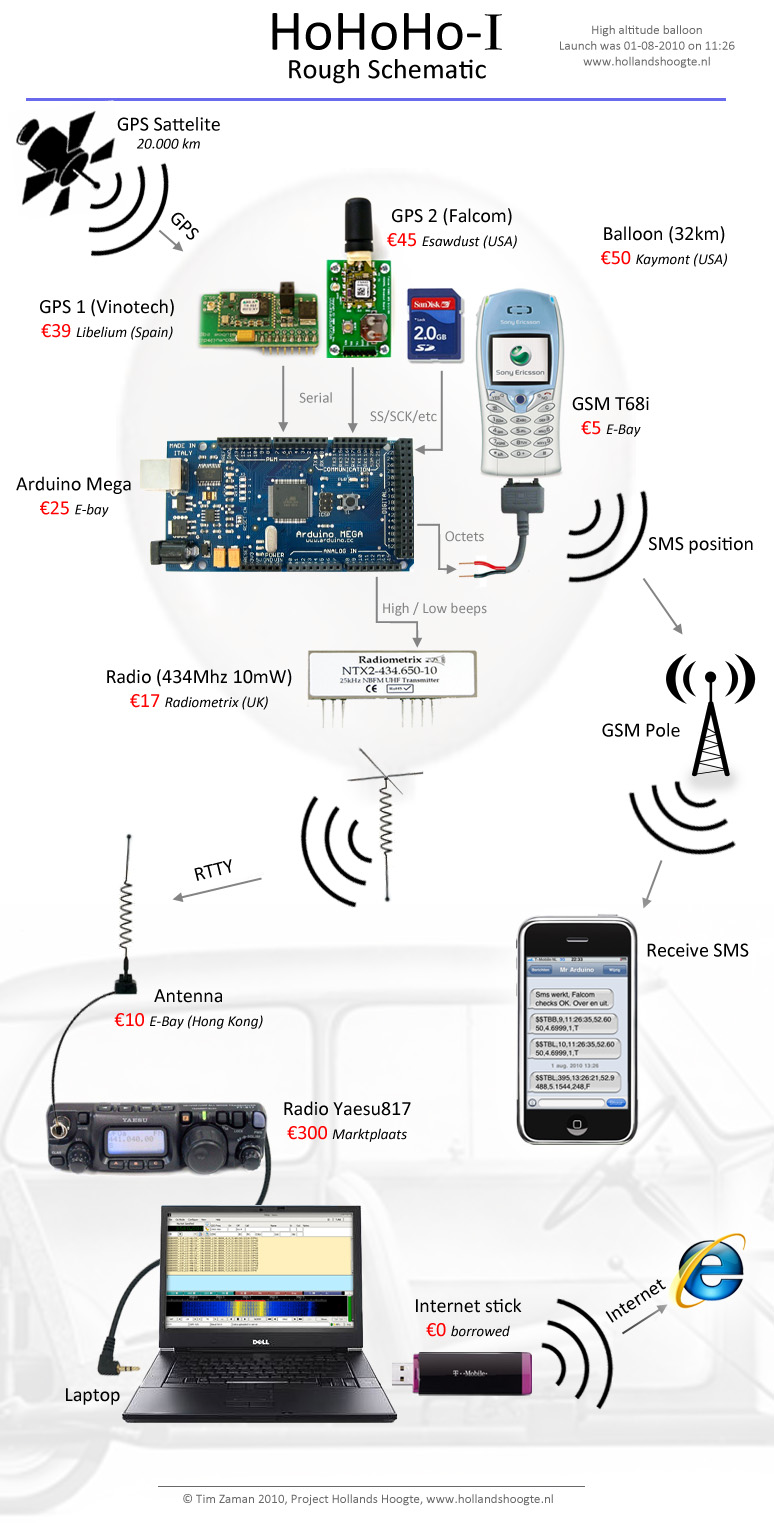
How it works:
Pictures!








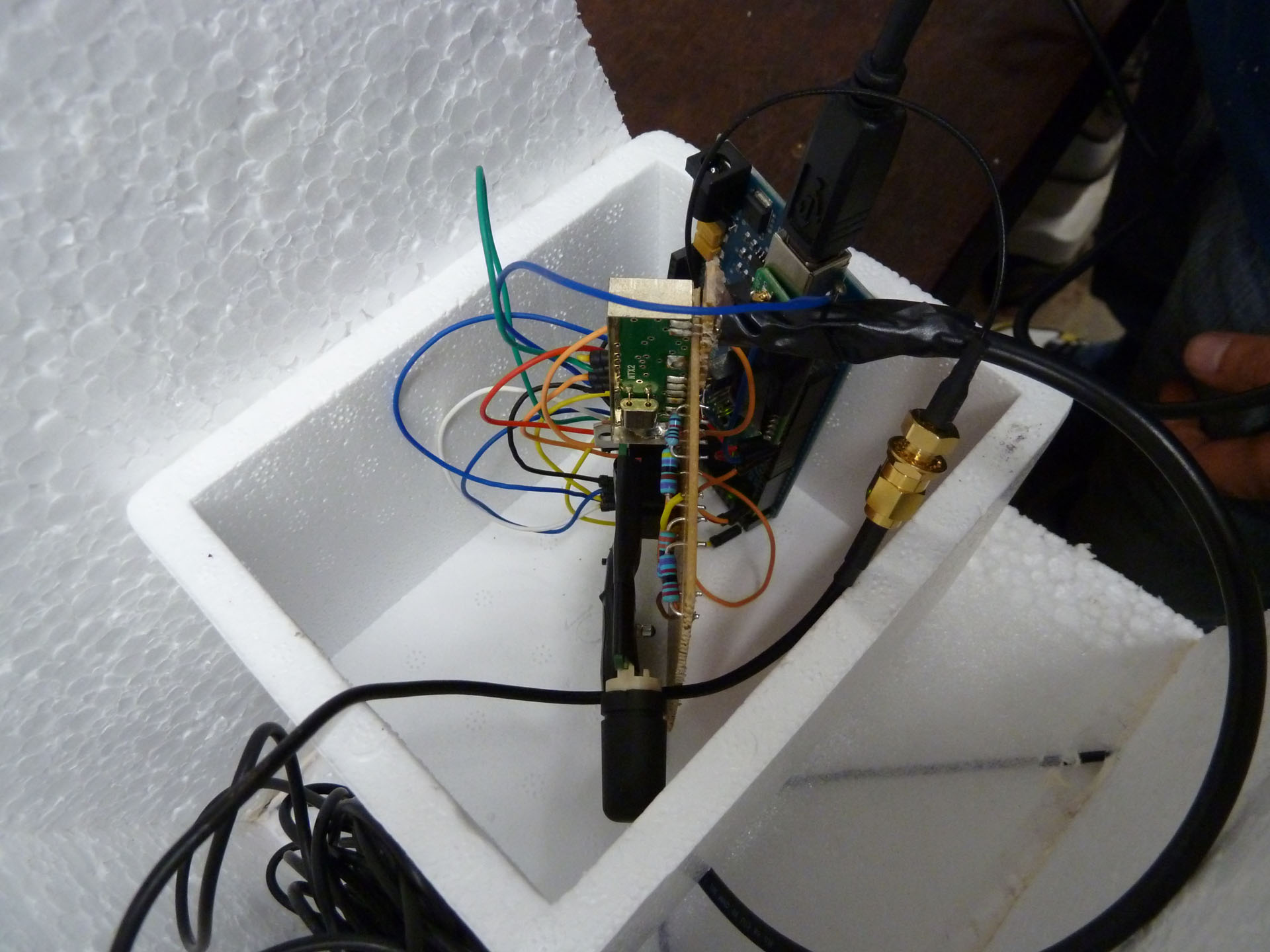












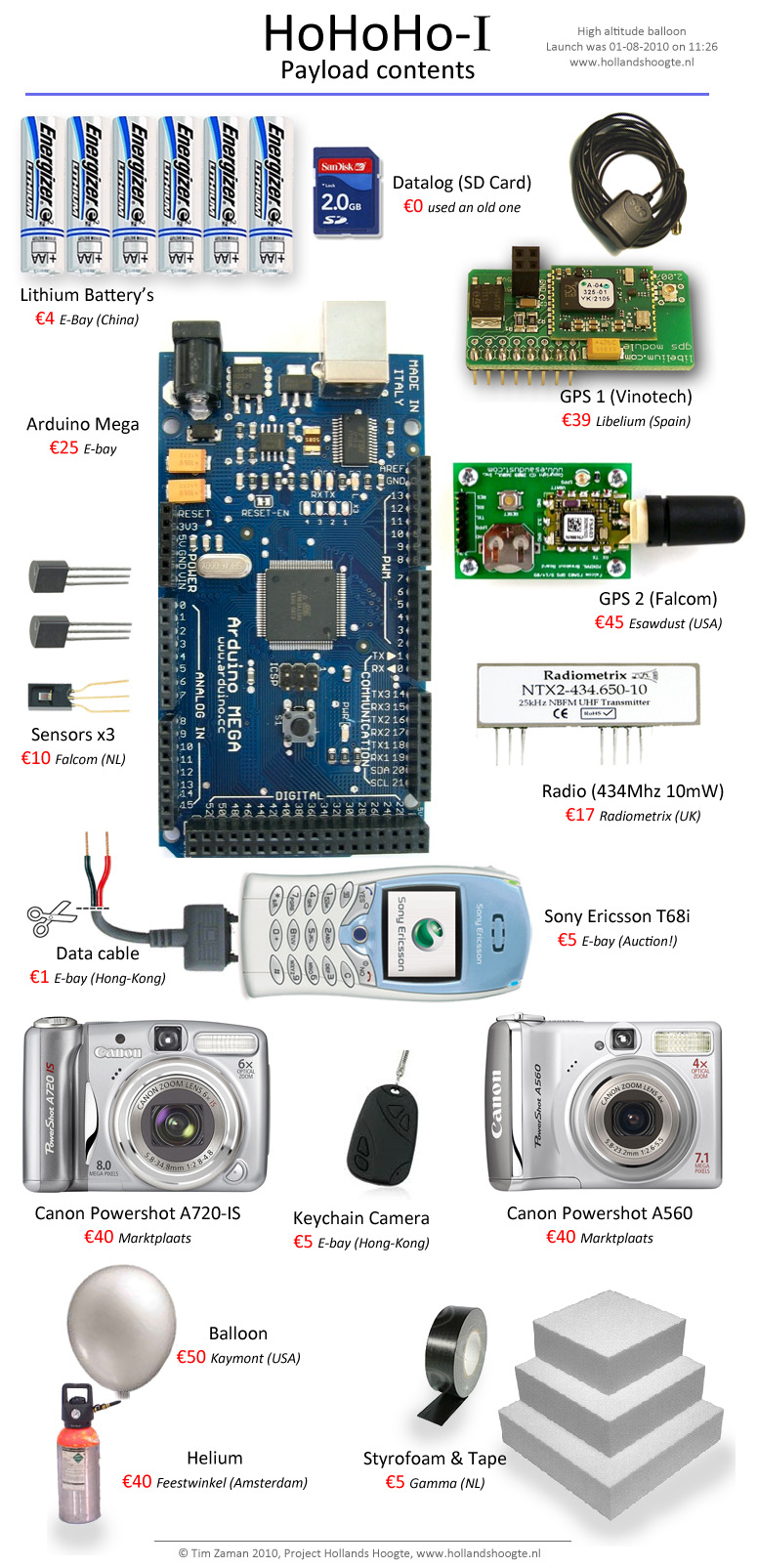
Payload Contents
| Canon A720IS | Videotaped for 1:30 hours |
| Canon A560 | Took ~700 pictures in 3:00 hours |
| Spycam Keychain HD | Videotaped 58min |
| Parachute | Worked but tangled |
| Radio | Radiometrix NTX2-10mW @ 434.650MHz RTTY 50b, 7n1, 350Hz shift |
| GPS | Tyco Vinotech Sirf III (from Libelium) |
| GPS | Falcom FSA03 (ublox) |
| Flightcomputer | Arduino Mega (1280) |
| Altitude record | $$TBL,328,13:05:41,52.8731,5.0361,31303,F*2E |
| First telemetry after release | $$TBL,41,11:35:30,52.6052,4.6997,2,T*0F |
| Last Telemetry before crash | $$TBL,395,13:26:21,52.9488,5.1544,248,F*23 |
| Duration | 60+27+25=112 minutes |
| Reboot after crash (first) | $$TBB,2,13:27:31,52.9487,5.1555,18,T*0A |
| Reboot after crash (last) | $$TBL,213,14:27:06,52.9455,5.1657,-4,T*1B |
| Float duration in water | 58 minutes |
More Videos…
Raw Video 10/12 (~30km)
Raw Video 2/12 (~5km)
Raw Video from the $7 spycam taped on the side
All 700 pictures stitched into a video
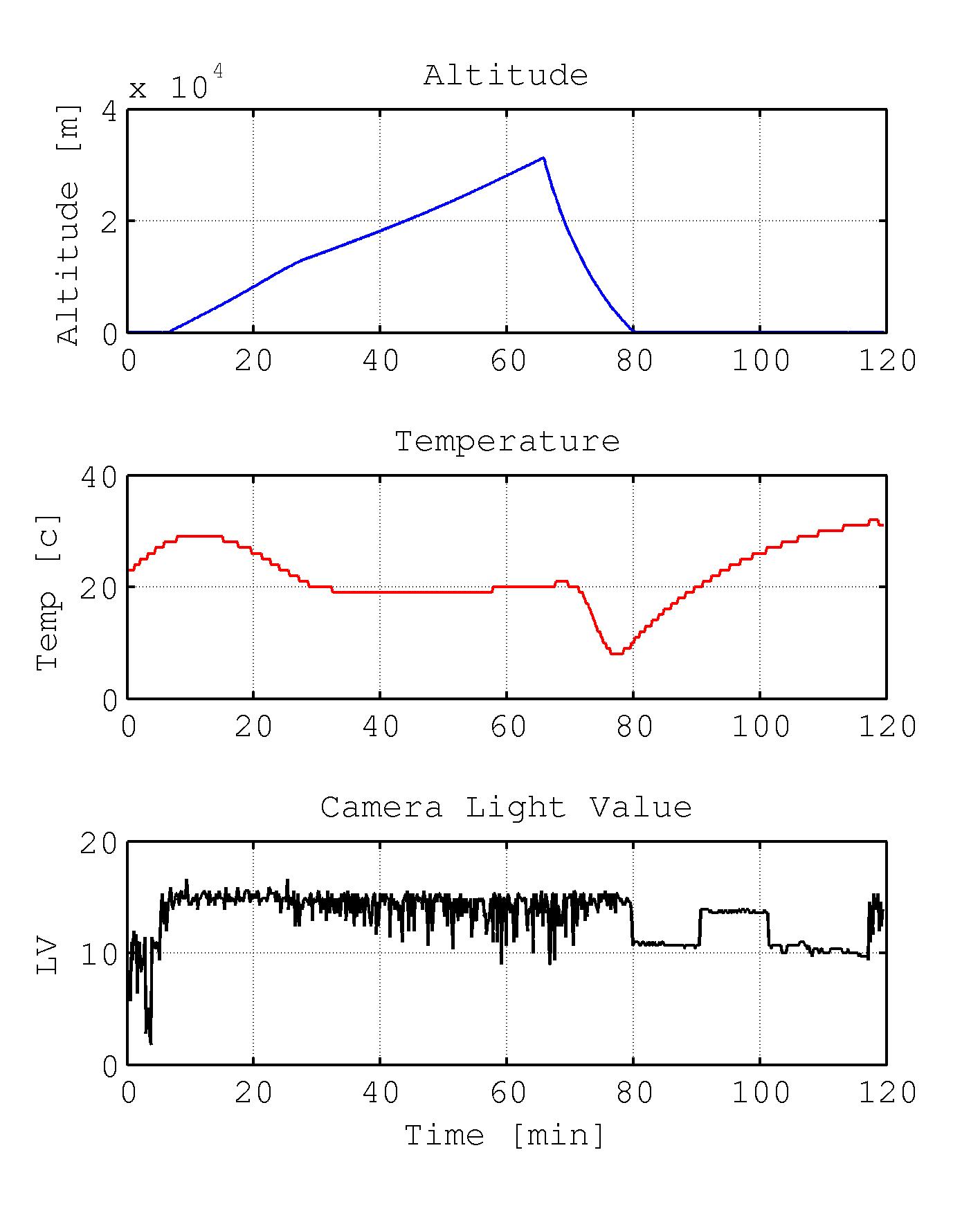
Sensor graphs
The formula for the Light Value in the bottom graph is from the camera. (It’s like EV but it takes ISO in account). I had absolutely no idea what exposure you need in “space”, so i set it to automatic. It turns out an EV of around 14 would be best (for instance 1/500 f5.6 ISO100).
LV=log2(Fnumber^{2}/Shutterspeed/ (ISO/100))

Some people helped tracking the balloon live with their radio’s. One of them from Schotland, 460km away picked up our GPS signals from the balloon!
Resources
- Raw telemetry received from car chase
- Flightlog 1: LOG015_flight.txt
- Flightlog 2: LOG016_aftersplashdown.txt
- Google Earth Trajectory file: HoHoHo_1.kml
- Google Earth Trajectory file with images (3Mb): HoHoHo_1.kmz
Thanks
Special thanks to: Wouter Dasselaar, the driver of the Pollo; Daniela for filming, Daniel Richman for helping with the code; Terry Baume and Richard Harrison for code snippets, Jon Sowman for setting the tracker; the UKHAS (UK High Altitude Society) team for advice and support and tracking/listening in; CUSF (Cambridge University Space Flight) for hosting the tracker and all that.]]>